Back
Blogs
Scaling PyTorch Training Across GPUs: Mastering Data Parallelism in Real Projects
28 Dec, 2025
•
08.01 AM
BLOG

Other Blogs

Profiling Python Performance: Systematic Measurement with cProfile and SnakeViz
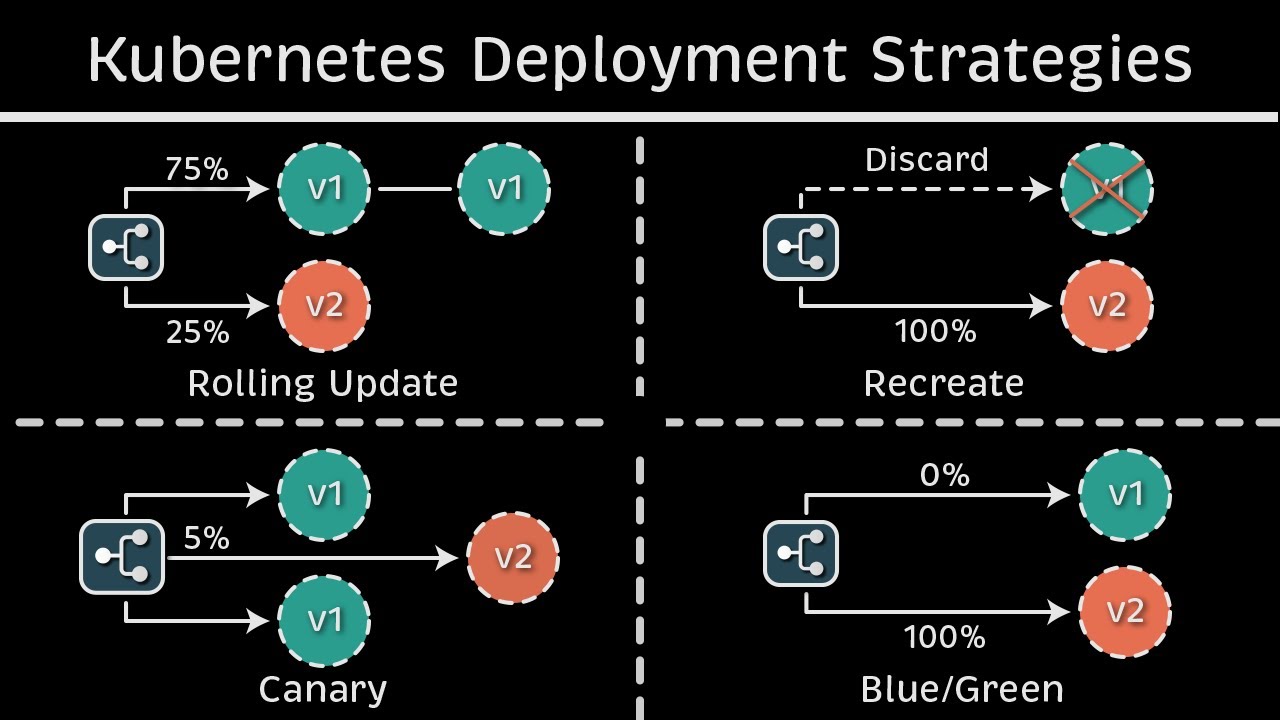
Is Kubernetes rolling update truly zero downtime ?

Business Development Executive Job Description: Top Duties and Qualifications

Sitecore JSS and Sitecore Docker

What is the difference between Sitecore SXA and Sitecore JSS